4D打印材料,Advanced Materials!
Advanced Materials
4D打印
非均质聚合物
致动器
2023-12-15 09:13:01
0
488
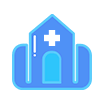
在过去十年中,响应材料,由于其在智能材料系统中的多功能应用,成为研究人员的焦点。因此它们能够响应温度、电场或磁场的变化等刺激而改变形状,因此被定义为智能系统。尤其在一系列应用中都表现出了潜力,如能量采集系统、智能致动器、智能纺织品,甚至在机器人外骨骼开发中。常用的响应系统有压电体、磁致伸缩材料、气动系统、介电弹性体和形状记忆合金(SMAs)。特别是SMAs,由于其能够通过焦耳加热实现局部致动,和固有的高致动应力,作为响应应用的首选材料脱颖而出。然而,需强调的是,SMAs最大挑战之一是有限的复杂性,最新进展是利用3D打印技术来应对这一挑战。尽管取得了一些进步,但由于形状记忆效果不足,3D打印SMA仍有实际局限性。此外,无论是采用传统制造方法还是3D打印,SMAs始终表现出低重复性、低可逆性,并且在制造之前或之后需要额外的预编程步骤。该过程需要将SMAs配置为目标形状,将其加热至马氏体相(≈500°C)以上,随后冷却至奥氏体相(约25°C)。鉴于这些挑战,迫切需要这样的材料,其具有响应性和增强的可逆性,与制造方法无缝对接,以实现复杂的形状变化。3D打印的刺激响应材料可以产生变形和多功能结构,4D打印是一个特别有前景的新兴领域,以时间为第四维度。这种方法能够对预先编程的响应片材进行3D打印,其在暴露于外部刺激时转变为复杂表面,从而大幅减少材料消耗和打印时间(70-90%)。然而,目前用于4D打印的材料通常是柔软的,如水凝胶、形状记忆聚合物(SMPs)、液晶弹性体(LCE)和聚(二甲基硅氧烷)(PDMS),在形变过程中弹性模量(E)范围为10-4-10 MPa,这限制了所得结构的可扩展性、致动应力和承载能力。为了克服这些限制,美国波士顿大学J. William Boley介绍了多尺度非均质聚合物复合材料作为一种新型的刚性、热响应4D打印材料。这些油墨的弹性模量比现有4D印刷材料大四个数量级,并提供可调的电导率,同时实现焦耳加热致动和自感测能力。利用电控双层作为构建块,设计并打印了一种变形为3D自立式提升机器人的平面几何结构,与其他3D打印致动器相比,创下了重量归一化提升载荷和致动应力的新纪录。此外,该墨水调色板用于创建和打印平面晶格结构,其转变成各种自支撑的复杂3D形状。这些贡献被集成到一个4D打印的电控多节爬行机器人晶格结构中,可以承载自身重量的144倍。相关研究工作以“Multiscale Heterogeneous Polymer Composites for High Stiffness 4D Printed Electrically Controllable Multifunctional Structures”为题发表在国际顶级期刊《Advanced Materials》上。这项工作介绍了多尺度非均质聚合物复合材料,作为一种新型的刚性、电控4D打印材料(图1a)。因为它们含有多种成分,包括交联密度可调的聚合物基质,以及各种各向同性和各向异性的纳米级和微米级填料,所以称这些复合材料为非均质复合材料(图1b)。利用该平台,产生了一组37种油墨,涵盖了广泛的负和正线性热膨胀系数(-19.1±0.3-128.8±1.2ppm°C-1)(图1c)。这套油墨的E范围比现有4D打印材料的E范围(0.34±0.1-38.6±1.4GPa)大四个数量级(图1c),并提供可调的电导率(0.7±0.1-3.5×103±9.9Sm-1)(图1d),以同时实现焦耳加热驱动和自感测能力,并保持最先进水平的热响应性(图1c)。利用电控双层作为构建块,研究者设计并打印了一个平面几何形状,其形状可变成了一个3D自立式提升机器人,与其他3D打印致动器相比,创下了提升能力(≈888倍于其自重)和致动应力(≈6MPa)的新纪录。将这种升降机器人与闭环控制系统集成,实现了自动调节驱动,表现出4.8%的过冲和0.8%的下冲,同时有效地抑制了高达机器人重量170倍的干扰,从而创造了性能的新纪录。此外,使用墨水调色板来创建, 以及3D打印转换成各种自支撑复杂3D表面的平面晶格结构。最终,使用新墨水调色板来实现4D打印的电控多节爬行机器人晶格结构,具有电粘合脚,突出了其运输负载的能力,高达其自身重量的144倍。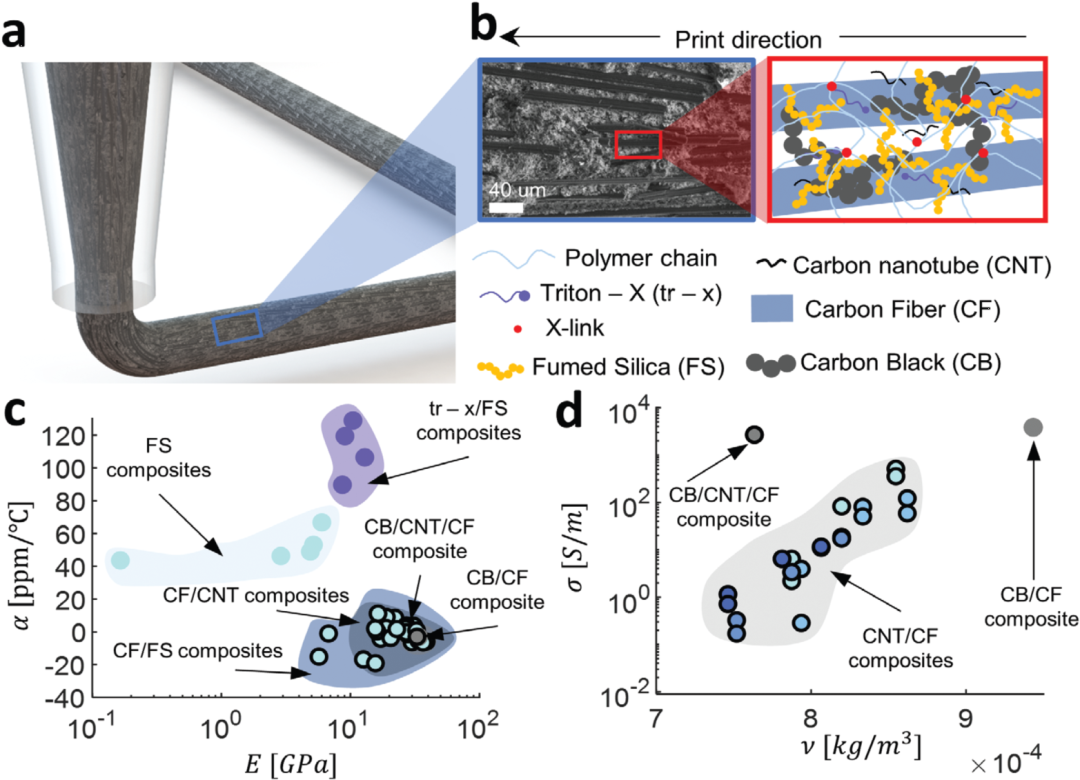
图1. 可印刷非均质环氧复合油墨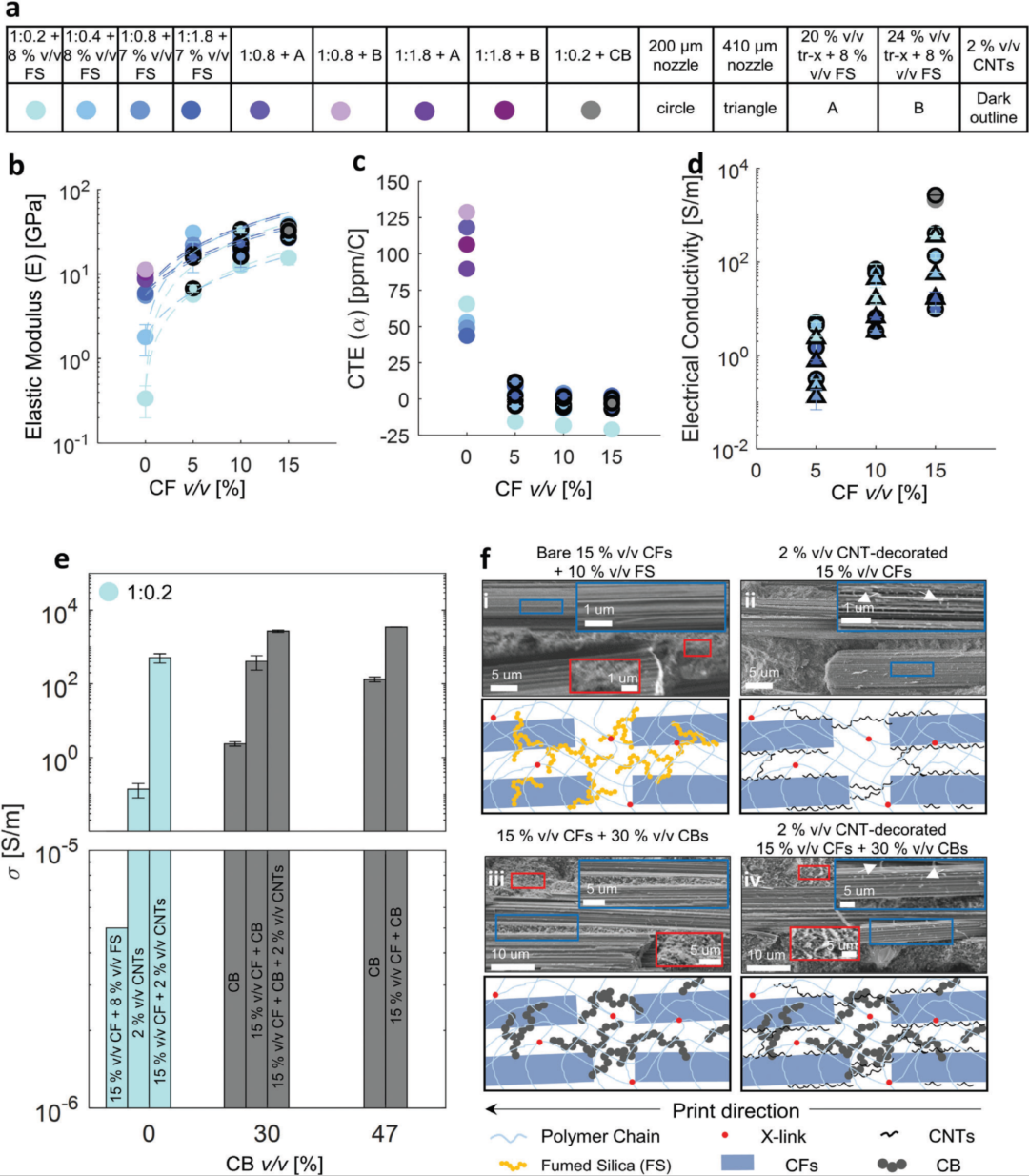
图2. 非均质环氧树脂复合材料的表征
图3. 多材料4D印刷电控双层
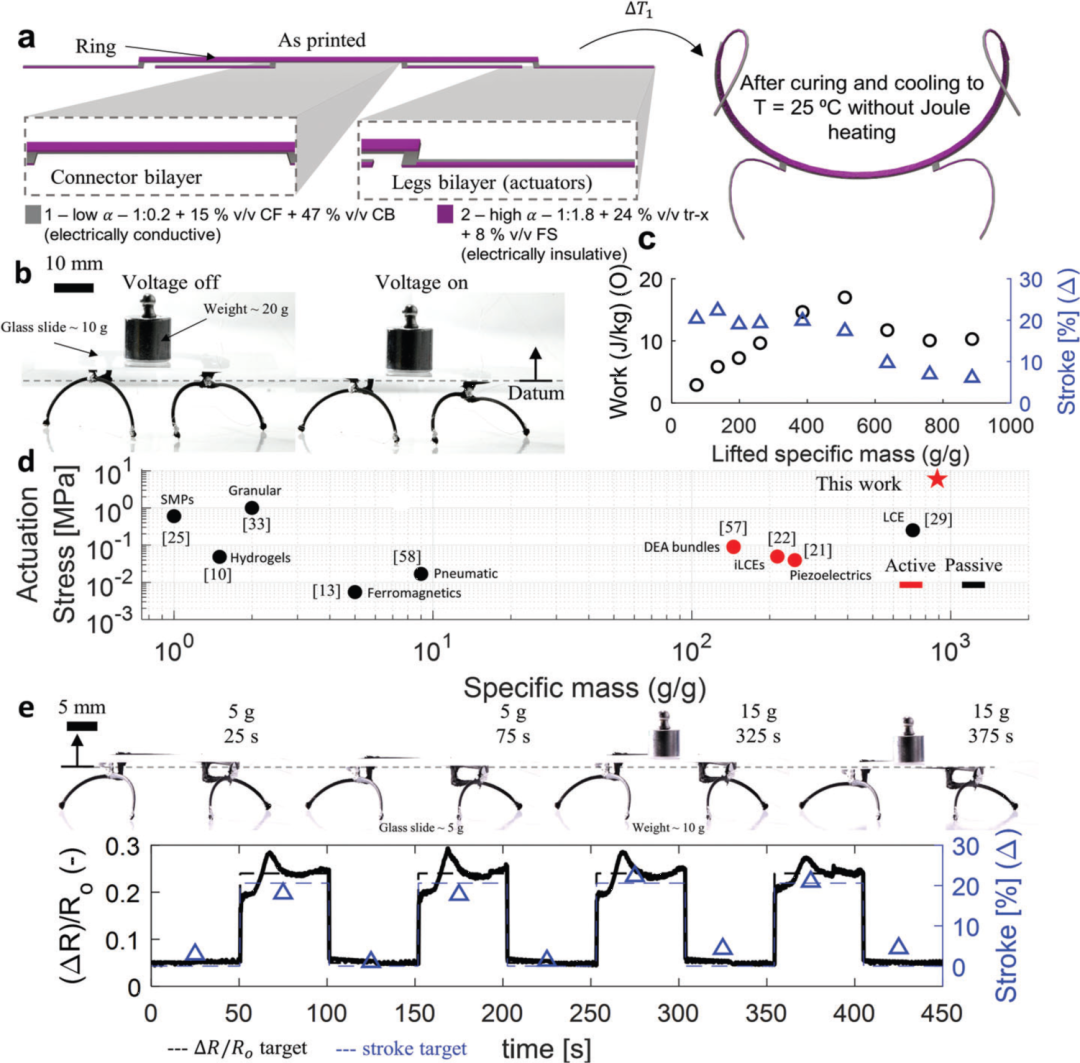
图4. 多材料4D打印举重机器人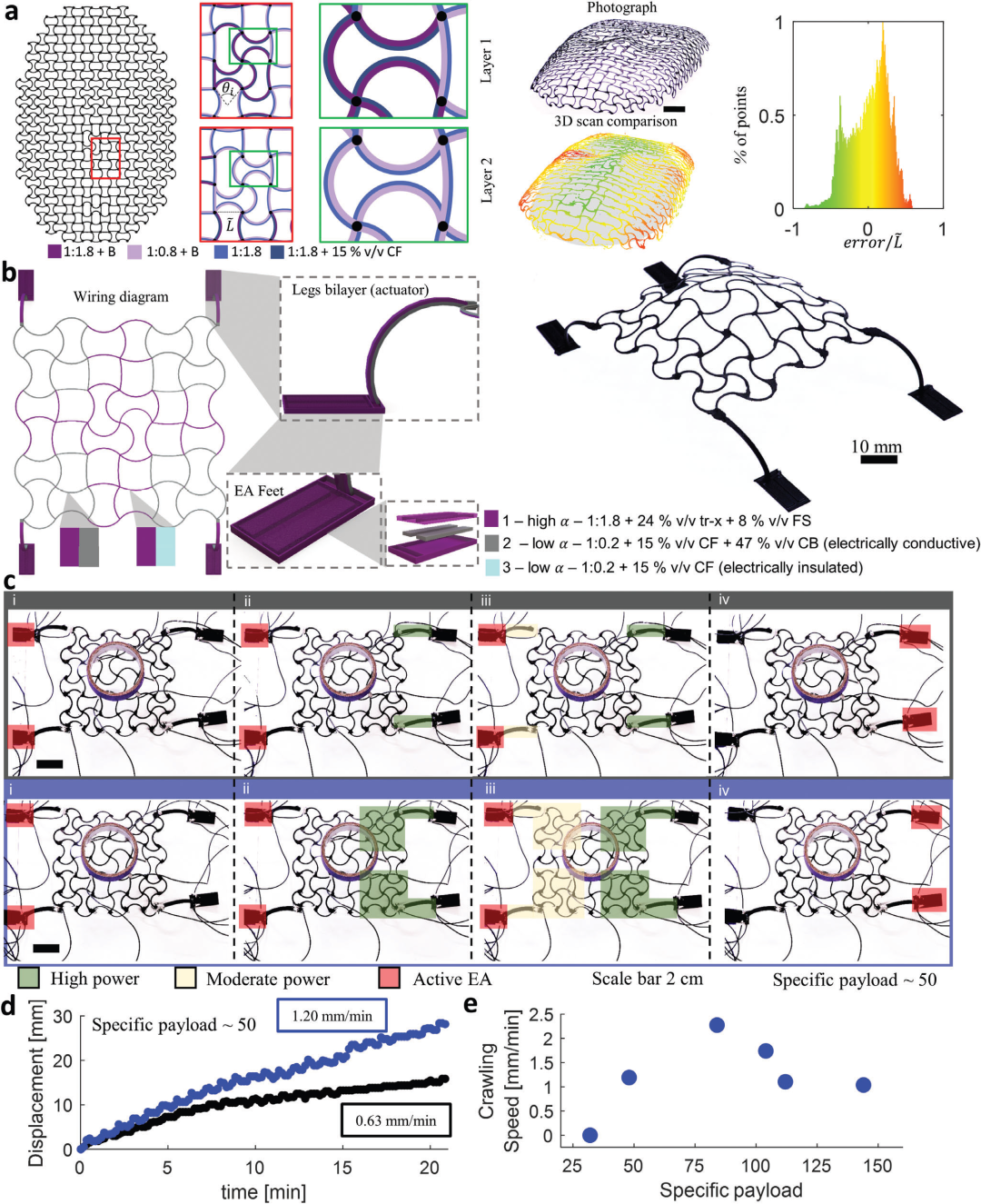
图5. 多功能3D晶格结构的集成设计和制造研究者开发了用于4D打印的新型非均质聚合物复合材料,具有高刚度、可调的热膨胀系数(α)和导电性(σ)。证明了这些材料的印刷双层表现出可编程和可预测的热响应和机械响应,在通过焦耳加热驱动时具有高应变系数自感测。这些材料能够制造一种具有高度可重复的自感测能力的新型刚性提升致动器,使得能够实现调制驱动的闭环控制,比负载能力高达其自身重量的885.90倍。与现有3D打印主动致动器相比,该机器人在致动应力和比质量上分别提高了150倍和3.55倍。此外,将机器人致动器的性能与3D打印的商用致动器进行比较,本研究的致动器是19种不同类型中性能第五高的致动器。表明这些材料可以与晶格结构的多材料4D打印相结合,以形成大的、刚性的和复杂的形状转换结构。将这些材料的多功能性与变形晶格方法相结合,研究者开发了一种具有多种爬行运动模式的刚性、电控形状移动机器人晶格。随着进一步发展,这些材料可用于新的复合材料结构设计,以开发更强大、自主的变形系统,如传感器、致动器、天线和机器人。文献链接:
https://doi.org/10.1002/adma.202307858
本文为e测试原创,未经允许,禁止转载!